Da ich auch mal was mit einem Servo bauen wollte,
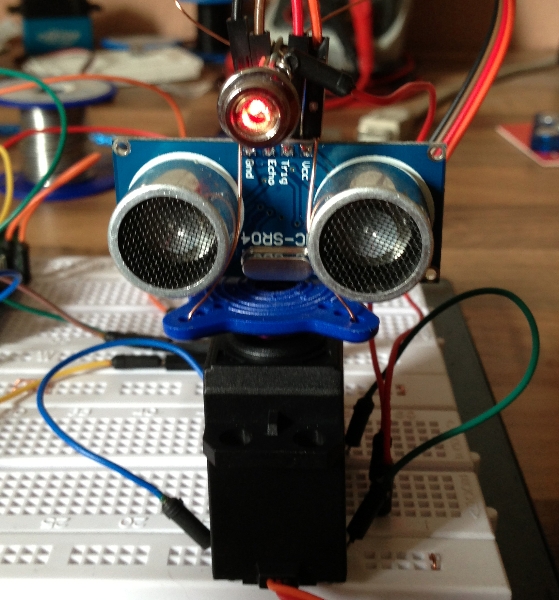
habe ich eine kleine „Selbstschussanlage“ in 2 Versionen gebaut .
Es wurden hierfür verwendet:
- Arduinio Uno
- Laser aus einem alten Laserstift
- Modellbau Servo
- HC-SR04 Ultraschallsensors
Viel Spaß damit ;o)
Version 1:
https://www.youtube.com/watch?v=Rm9CACL7nVs
#include <Servo.h>
#include <NewPing.h>
Servo myservo;
//Servo Config
static byte ScanServoPin = 9;
//Sonar Config
static byte TRIGGER_PIN = 12;
static byte ECHO_PIN = 11;
static byte MAX_DISTANCE = 30;
static byte LaserPin = 3;
static byte Standby = 7;
long previousMillis = 0;
int ledState = HIGH;
void setup()
{
Serial.begin (115200);
pinMode(LaserPin, OUTPUT);
pinMode(Standby, INPUT);
}
void loop()
{
if(digitalRead(Standby) == LOW)
{
digitalWrite(LaserPin, LOW);
ScanServo(ScanServoPin);
}
else
{
LaserSleep();
}
}
void Laser()
{
for (int i = 0; i < 5; i++)
{
digitalWrite(LaserPin, HIGH);
delay(55);
digitalWrite(LaserPin, LOW);
delay(55);
}
}
void LaserSleep()
{
unsigned long currentMillis = millis();
if(currentMillis - previousMillis > 1000)
{
previousMillis = currentMillis;
if (ledState == LOW)
{
ledState = HIGH;
SleepMessag();
}
else
{
ledState = LOW;
}
digitalWrite(LaserPin, ledState);
}
}
void FireMessag(int Target, int Range)
{
Serial.println(F("Alarm!"));
Serial.print(F("Es wurde ein Ziel gesichtet auf "));
Serial.print(Target);
Serial.print(F("Grad und "));
Serial.print(Range);
Serial.println(F("cm Entfernung."));
Serial.println(F("Feuer!!!!!!"));
Serial.println(F(""));
Serial.println(F(""));
}
void NoTargetMessag()
{
Serial.println(F("Es wurden keine Ziel gesichtet."));
Serial.println(F("Starte naechsten Scann der Umgebung........"));
Serial.println(F(""));
Serial.println(F(""));
}
void SleepMessag()
{
Serial.println(F("System ist im Standby....."));
Serial.println(F(""));
Serial.println(F(""));
}
void ScanServo (int Pin)
{
myservo.attach(Pin);
int pos = 1;
for(pos = 1; pos < 180; pos += 1)
{
unsigned long currentMillis = millis();
myservo.write(pos);
if(currentMillis - previousMillis > 100)
{
previousMillis = currentMillis;
if(Sonar() > 0)
{
FireMessag(pos, Sonar());
Laser();
}
}
delay(10);
}
NoTargetMessag();
previousMillis = 0;
for(pos = 180; pos>=1; pos-=1)
{
unsigned long currentMillis = millis();
myservo.write(pos);
if(currentMillis - previousMillis > 100)
{
previousMillis = currentMillis;
if(Sonar() > 0)
{
FireMessag(pos, Sonar());
Laser();
}
}
delay(10);
} // waits 15ms for the servo to reach the position
NoTargetMessag();
previousMillis = 0;
}
int Sonar()
{
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
unsigned int dist = sonar.ping()/ US_ROUNDTRIP_CM;
return dist;
}Version 2:
https://www.youtube.com/watch?v=Z51RZTEvTdU
#include <Servo.h>
#include <NewPing.h>
Servo myservo;
//Servo Config
static byte ScanServoPin = 9;
//Sonar Config
static byte TRIGGER_PIN = 12;
static byte ECHO_PIN = 11;
static byte MAX_DISTANCE = 30;
static byte LaserPin = 3;
static byte Standby = 7;
long previousMillis = 0;
int ledState = HIGH;
void setup()
{
Serial.begin (115200);
pinMode(LaserPin, OUTPUT);
pinMode(Standby, INPUT);
}
void loop()
{
if(digitalRead(Standby) == LOW)
{
digitalWrite(LaserPin, HIGH);
ScanServo(ScanServoPin);
}
else
{
LaserSleep();
}
}
void Laser()
{
for (int i = 0; i < 21; i++)
{
digitalWrite(LaserPin, LOW);
delay(55);
digitalWrite(LaserPin, HIGH);
delay(55);
}
}
void LaserSleep()
{
unsigned long currentMillis = millis();
if(currentMillis - previousMillis > 1000)
{
previousMillis = currentMillis;
if (ledState == LOW)
{
ledState = HIGH;
SleepMessag();
}
else
{
ledState = LOW;
}
digitalWrite(LaserPin, ledState);
}
}
void FireMessag(int Target, int Range)
{
Serial.println(F("Alarm!"));
Serial.print(F("Es wurde ein Ziel gesichtet auf "));
Serial.print(Target);
Serial.print(F("Grad und "));
Serial.print(Range);
Serial.println(F("cm Entfernung."));
Serial.println(F("Feuer!!!!!!"));
Serial.println(F(""));
Serial.println(F(""));
}
void NoTargetMessag()
{
Serial.println(F("Es wurden keine Ziel gesichtet."));
Serial.println(F("Starte naechsten Scann der Umgebung........"));
Serial.println(F(""));
Serial.println(F(""));
}
void SleepMessag()
{
Serial.println(F("System ist im Standby....."));
Serial.println(F(""));
Serial.println(F(""));
}
void ScanServo (int Pin)
{
myservo.attach(Pin);
int pos = 1;
int Range = 999;
int Target = 0;
int SonarNew = 0;
for(pos = 1; pos < 180; pos += 1) // goes from 0 degrees to 180 degrees
{
unsigned long currentMillis = millis(); // in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
if(currentMillis - previousMillis > 50)
{
previousMillis = currentMillis;
SonarNew = Sonar();
if(SonarNew > 0)
{
if(Range > SonarNew)
{
Range = SonarNew;
Target = pos;
}
}
}
delay(10); // waits 15ms for the servo to reach the position
}
if(Target > 0)
{
myservo.write(Target);
delay(600);
FireMessag(Target, Range);
Laser();
}
else
{
NoTargetMessag();
Range = 999;
Target = 0;
previousMillis = 0;
}
for(pos = 180; pos>=1; pos-=1) // goes from 180 degrees to 0 degrees
{
unsigned long currentMillis = millis();
myservo.write(pos); // tell servo to go to position in variable 'pos'
if(currentMillis - previousMillis > 80)
{
previousMillis = currentMillis;
SonarNew = Sonar();
if(SonarNew > 0)
{
if(Range > SonarNew)
{
Range = SonarNew;
Target = pos;
}
}
}
delay(10); // waits 15ms for the servo to reach the position
}
if(Target > 0)
{
myservo.write(Target);
delay(600);
FireMessag(Target, Range);
Laser();
}
else
{
NoTargetMessag();
Range = 999;
Target = 0;
previousMillis = 0;
}
}
int Sonar()
{
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
unsigned int dist = sonar.ping()/ US_ROUNDTRIP_CM;
return dist;
}Der Aufbau:
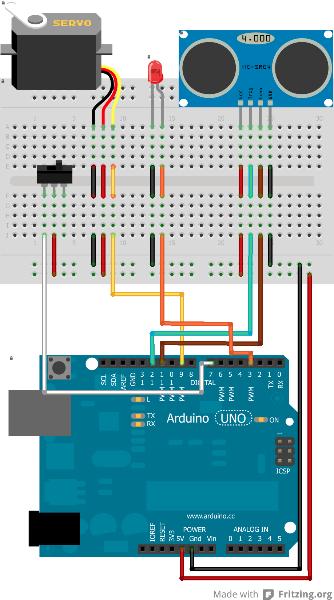
")



